Call Graphs
The call graph in LiSA has a dual responsibility: it implements the logic for
resolving a call to its targets, and it keeps track of the callees and callers
of each control flow graph. The latter is the cause for the CallGraph
inheriting from the BaseGraph class, a simple graph implementation provided by
LiSA based on an adjacency list. The latter class won’t be detailed here, as it
mostly provides standard constructs for graph manipulation (e.g., adding and
removing nodes and edges, iterating over the graph, etc.).
This page contains class diagrams. Interfaces are represented with yellow rectangles, abstract classes with blue rectangles, and concrete classes with green rectangles. After type names, type parameters are reported, but their bounds are omitted for clarity. Only public members are listed in each type: the
+ symbol marks instance members, the * symbol marks
static members, and a ! in front of the name denotes a member with a default
implementation. Method-specific type parameters are written before the method
name, wrapped in <>. When a class or interface has already been introduced in
an earlier diagram, its inner members are omitted.
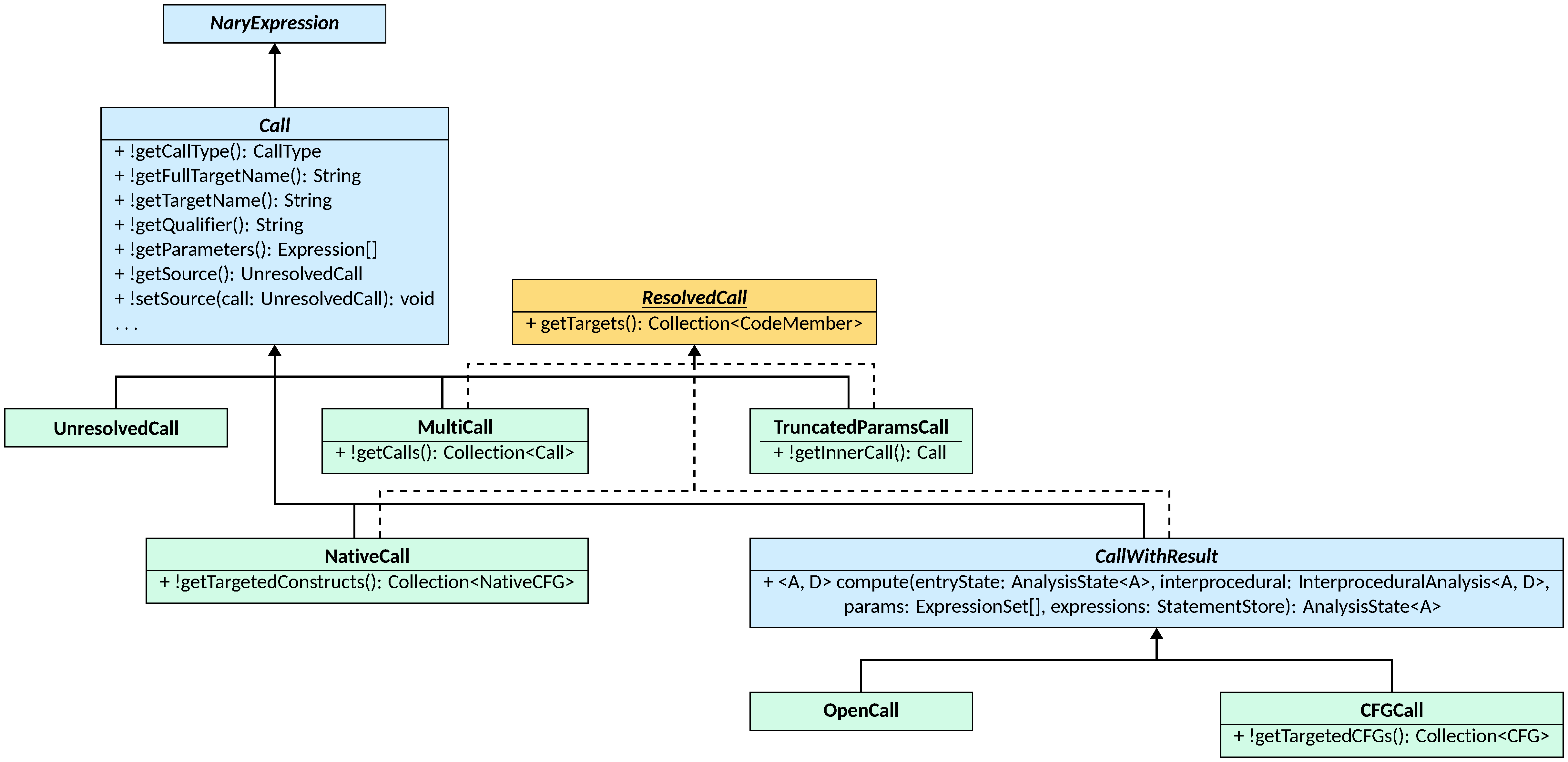
Calls
Understanding how calls are represented in LiSA is crucial to reason on the
call graph. The Call class is the root of the call hierarchy, and contains the
general structure that is shared among all call types.
The superclass of Call, the NaryExpression class, is detailed in the
expressions page: for the
contents of this page, it suffices to know that it is a generalization of
an expression that can have zero or more sub-expressions. The Call abstract
class defines the components of a call’s signature: the name of the target
program member that is being invoked (getTargetName), the qualifier of the
call, if any (getQualifier — an optional string that is used to refer to
the unit in which the target member is declared, e.g., a class name for a Java
static method call, or a module name for a Python function call), and the arguments
passed to the call (getParameters).
In addition, each call has a type (getCallType), that is defined through an
enumeration that can assume values STATIC, INSTANCE, or UNKNOWN. The call
type is meant as a way to instruct the call graph on how to resolve the call.
A STATIC call is a call that does not have
a receiver: during resolution, targets will be searched in the whole program,
optionally restricting the search to types that match the qualifier, if any.
An INSTANCE call instead is a call that has a receiver: the type
of the first parameter determines the leaf of the type hierarchy where the call
targets are to be searched, that is traversed upwards as is typical of
object-oriented languages. An UNKNOWN call is a call for which it is not
possible to determine whether it has a receiver or not at parse time,
for which both resolutions are attempted.
The most common call instance that is produced by frontends is the
UnresolvedCall: a call that has not been resolved yet, and that must be
handled by the call graph to determine its targets. Since the resolution of an
UnresolvedCall leads to the creation of a second call, the Call class offers
means to record the UnresolvedCall that led to its creation: using
setSource, one can record that a call originated from a given UnresolvedCall,
that can be retrieved using getSource. This is useful to access the control
flow graph containing the call: since resolved call do not appear syntactically
in the program, they are not directly part of a control flow graph but must
resort to their source UnresolvedCall to access the graph they belong to.
The resolution process yields to the creation of Call instances that also implement
the ResolvedCall interface, that provides means to access the targets of the
call. getTargets returns a collection of CodeMembers, an interface that
describes the general structure of a program member that contains code (e.g., a
control flow graph, or a summary of a function from the standard library —
more information available in the control flow graphs page).
The interface is implemented by several classes. The three core implementations are:
NativeCall: a call to one or moreNativeCFGs, that are special CFGs that represent the behavior of library or runtime functions without having to analyze their code;CFGCall: a call to one or moreCFGs under analysis;OpenCall: a call for which no target could be resolved, and thus needs to be over-approximated.
Since a call might resolve to a mix of NativeCFGs and regular CFGs, the
MultiCall class is provided as a wrapper to represent a call that embeds
multiple underlying calls. Finally, the TruncatedParamsCall is a special call
generated when calls whose type is UNKNOWN are resolved to static targets: the
first parameter passed to the call is actually the qualifier, and is thus
removed in semantic computations.
Symbol Aliasing
Often, programming languages allow some means of defining aliases for program
members, similar to Python’s import as or C#’s using. These might affect the
resolution of calls, as the name of a function or class might have been locally
renamed by one of these constructs. Such aliases can be stored in an instance of
the SymbolAliasing class. This is a subtype of
FunctionalLattice
that maps instances of Symbol (i.e., a name with an optional qualifier) to
a set of Symbols that represent the possible aliases of the symbol. Instances
of SymbolAliasing are automatically extracted from the
ProgramState
and passed to the call graph’s resolve method.
The CallGraph class
The CallGraph class is the root class of the call graph hierarchy. It inherits
from BaseGraph (hidden in the class diagram), and provides standard graph
methods to access, add, and remove nodes and edges.
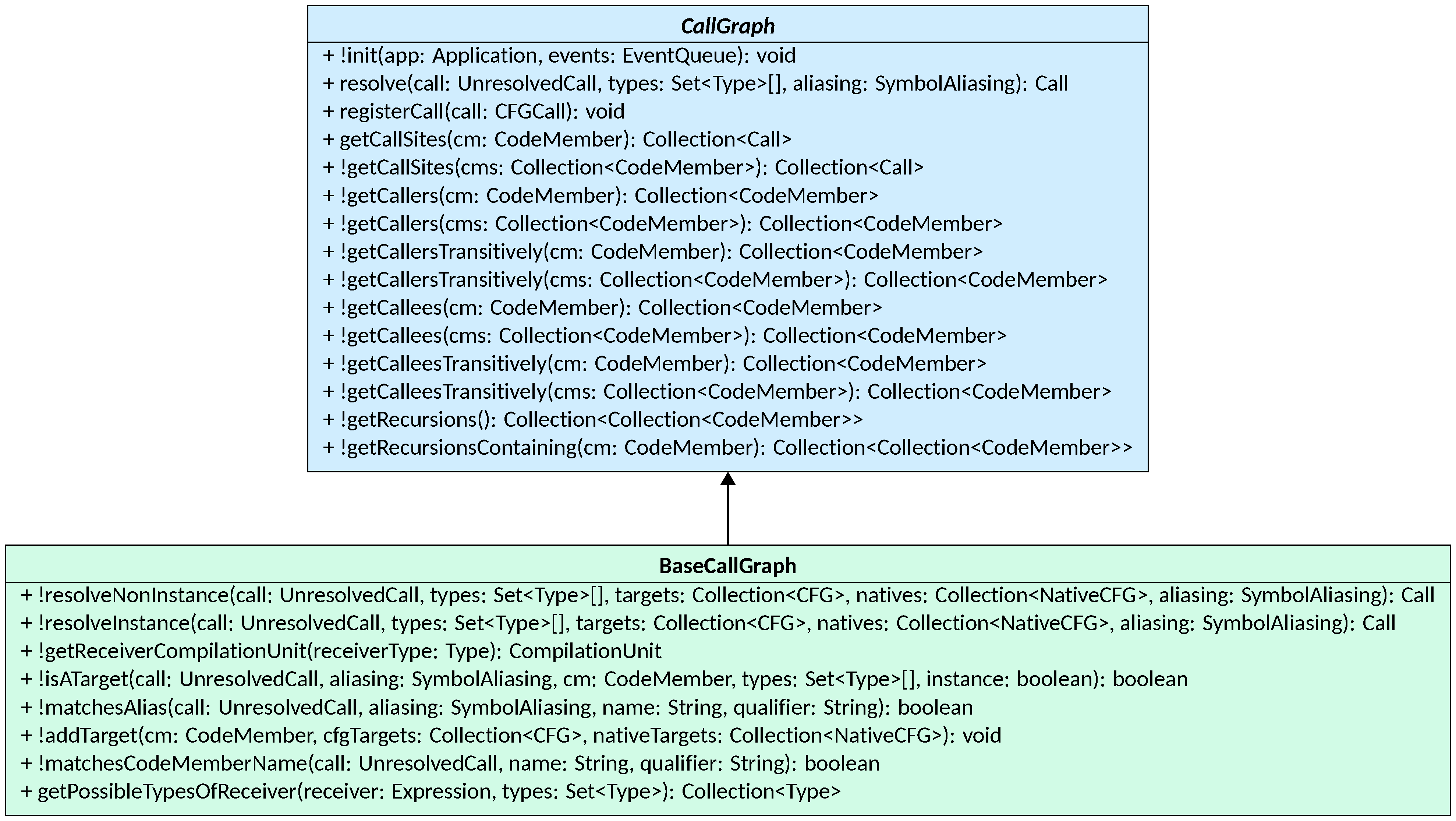
The CallGraph class adds several methods, most of which have default
implementations:
initinitializes the call graph by storing the Application to analyze and the Event Queue to use for emitting events (note that this method is called only once by LiSA, at the beginning of the analysis);getCallers,getCallees,getCallersTransitively, andgetCalleesTransitivelyreturn the (transitive) callers and callees of a given control flow graph, respectively, by looking at the predecessors and successors of the graph in the call graph (both have an overload that receives a collection of control flow graphs, and returns the union of their callers and callees);getRecursionsreturns the collection of recursions (i.e., loops in the call graph), andgetRecursionsContainingreturns the ones that include a certain control flow graph.
Three methods require implementation by subtypes of CallGraph. The
getCallSites method yields all calls that invoke a given CodeMember.
This method is used by the overload accepting a collection of CodeMembers
to return the union of their call sites.
New edges in the call graph can be added either by resolving a call, or by
manually informing the graph that a call is being executed. In both methods,
NativeCalls are never registered in the call graph as they do not point to a
CFG. The registerCall method can be used, given a CFGCall (i.e., an
already-resolved call that is linked to the CFG it might invoke), to add an
edge from a caller to one or more callees. Instead, the resolve method
receives an UnresolvedCall, the set of Types for each argument, and
SymbolAliasing information, produces a resolved Call instance.
For a list of call graphs already implemented in LiSA, see the Configuration page.
The BaseCallGraph class
In most cases, the resolution logic follows the same workflow,
parametric to all language-specific algorithms. Such workflow is implemented in
the BaseCallGraph class, that provides implementations for the abstract
methods of CallGraph:
registerCalladds the necessary nodes and edges to the call graph, skipping calls that result from the resolution ofUnresolvedCalls (i.e., ones whosegetSourceyields anUnresolvedCall) since those get registered during resolution;getCallSitesreturns the calls that invoke the target member from a cache, that is filled whenever a call is registered or resolved;resolvedelegates the resolution toresolveInstanceandresolveNonInstance, and then creates aCallinstance based on the found targets; it then proceeds by registering the call (i.e., adding nodes and edges to the call graph) before returning it.
All methods involved in the resolution of both instance and non-instance calls
are implemented, but are left open for modifications by subclasses. The
resolution process implemented in resolve proceeds as follows:
- first, a cache is checked to see if the call has already been resolved with the same type information; if so, the cached result is returned;
- otherwise, the resolution is delegated to
resolveInstanceandresolveNonInstancedepending on the call type, or to both if the call type isUNKNOWN; - the results of the resolution are used to create a
Callinstance, that is then registered in the call graph and cached; the creation proceeds as follows:- if no target is found, an
OpenCallis created; - if only
CFGtargets are found, aCFGCallis created; - if only
NativeCFGtargets are found, aNativeCallis created; - if the call type is
UNKNOWNand onlyCFGtargets are found after removing the receiver (i.e., the first parameter) from the resolution and using it as a qualifier, aTruncatedParamsCallwrapping aCFGCallis created; - if the call type is
UNKNOWNand onlyNativeCFGtargets are found after removing the receiver (i.e., the first parameter) from the resolution and using it as a qualifier, aTruncatedParamsCallwrapping aNativeCallis created; - otherwise, the targets will fall in more than one category described above:
their respective
Callinstances are created, and wrapped in aMultiCall.
- if no target is found, an
Both instance and non-instance resolution exploit few auxiliary methods, each with a default implementation that can be overridden by subclasses to implement possible language-specific optimizations:
getReceiverCompilationUnitextracts the type definition from a type instance that represents the type of the receiver of an instance call; by default, inner types are extracted from pointers if necessary;isATargetchecks the signature of a code member to determine whether it is suitable for an unresolved call; by default, it first checks aliases to rewrite both the target name and the qualifier, and then proceeds by matching the fully qualified name throughmatchesCodeMemberNameand the suitability of the parameters through the program’s parameter matching strategy;matchesAliaschecks if an alias exist for the given name and qualifier that is suitable for the call; by default, it checks all entries in theSymbolAliasingfor the name and the qualifier, selecting the suitable ones throughmatchesCodeMemberName;addTargetadds a target to the correct collection of targets (i.e.,CFGorNativeCFG), depending on the type of the target; by default, it checks the type of the target and adds it to the correct collection;matchesCodeMemberNamechecks if the name and qualifier of a code member match the target name and qualifier of the call; by default, it checks for equality of both.
resolveNonInstance proceeds by first selecting the types where the targets are
to be searched are determined by looking at the call qualifier (if no qualifier
is present, all types in the program are considered), also considering possible
aliases. Then, each type is searched independently: if the type is not part of a
hierarchy (e.g., it is not part of a language that has classes), the search
filters all code members with isATarget. Then, for all selected targets, the
distance from a perfect target is computed (i.e., the number of type
conversions necessary for using the actual parameters of the call as parameters
of the target) using the program’s
parameter matching strategy,
and the ones with the lowest distance are added to the possible
targets. Note that if the call is ambiguous (i.e., there are multiple targets
with the same distance in the same type), an exception is raised.
Instead, if the type is part of a hierarchy, the hierarchy is traversed upwards
using the program’s
hierarchy traversal strategy.
For each traversed type, the same process described above is applied, but the
search is stopped as soon as at least a target is found, since the traversal
strategy ensures that the first targets found are the most specific ones.
resolveInstance proceeds similarly, but the search is restricted to the
type of the receiver (i.e., the first parameter of the call) and its supertypes.
The resolution starts by selecting the possible types of the receiver through
getPossibleTypesOfReceiver, the only abstract method of the class, that can
implement several techniques for call graph building (e.g., class hierarchy
analysis, rapid type analysis, etc.). For each such type, the corresponding type
definition is retrieved through getReceiverCompilationUnit. The hierarchy
of the definition is then traversed using the program’s
hierarchy traversal strategy,
and for each traversed type the instance code members are filtered using the
same process described above: isATarget is used to check the suitability of
the code member, the distance from a perfect target is computed, and the best
targets are selected. The search is stopped as soon as at least a target is found,
since the traversal strategy ensures that the first targets found are the most
specific ones. In case of ambiguity, an exception is raised.
Implementations of BaseCallGraph thus only need to provide an implementation of
getPossibleTypesOfReceiver to implement a call graph building algorithm, and can
rely on the default implementations of the other methods, that are designed to be
as generic as possible while respecting the possible language-specific features
that might affect the resolution process.